Présélections de matériel
Cet article regroupe les composants présélectionnés pour la maquette. Il sera mis à jour au fur et à mesure des choix définitifs. Cette page me sert de pense-bête et prise de notes.
Motorisation principale
Le moteur principal entraîne les poulies motrices via un réducteur. La vitesse de sortie sera de 25 tours minute à la poulie, et 2500 tours au moteur. Il me faut un moteur avec contrôle précis de la vitesse car j'ai un moteur par poulie et elles doivent rester synchronisées.
Moteur BLDC 57BYA54-24-01
- Type : Brushless
- Tension : 24 [V]
- Couple : 0.16 [N.m]
- Vitesse : 3000 [tr/min]
- Puissance nominale : 50 [W]
- Réducteur intégré : non

Contrôleur brushless
- Type : BLD-510B
- Tension : 12-48 [V]
- Puissance max : 200 [W] à 48V
- Courant max : 15 [A]
- Protocol contrôle : Modbus RTU sur RS485

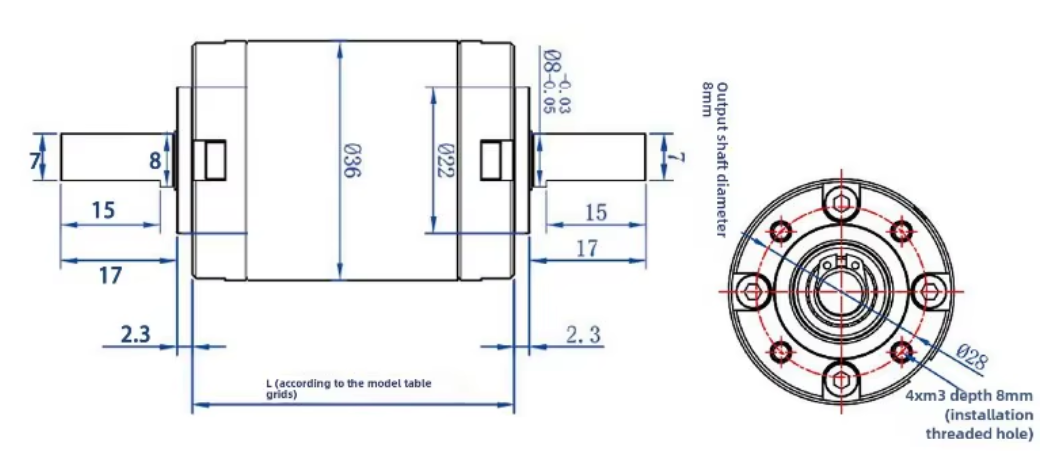
Réducteur principal de la poulie motrice
- Type : Planétaire
- Nombre d'étages : 3
- Ratio de réduction : 1/50
- Diamètre : 36 [mm]
- Longueur L : 43.5 [mm]

Motorisation convoyeurs
Les lanceurs et ralentisseurs utilisent des batteries de pneus motorisés. Chaque batterie nécessite un moteur indépendant. Avec un pneu lego de 17.5mm de diamètre, il faut une vitesse de moteur de 262 tours minute.
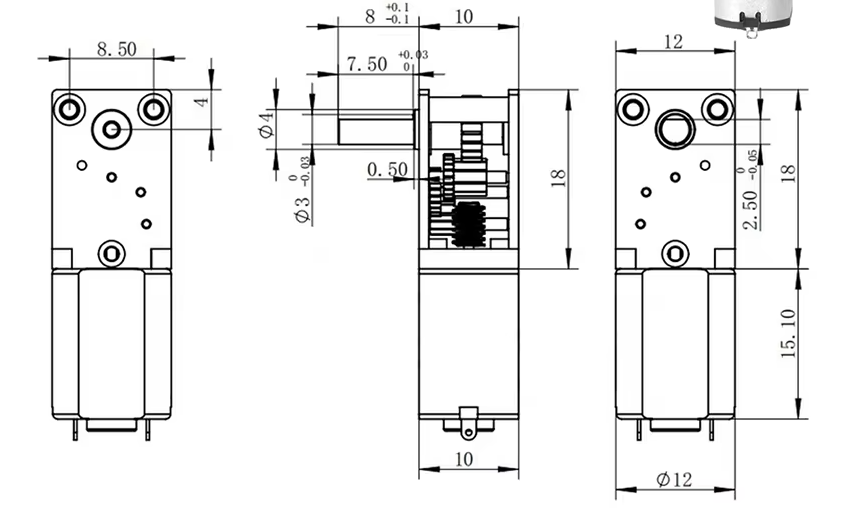
Moteur lanceur
- Type : DC
- Modèle : GW1812-N20-S0308D
- Tension : 12 [V]
- Vitesse : 381 [tr/min]
- Puissance : 1 [W]
- Réducteur intégré : facteur réduction 42

Pneus des lanceurs
- Type : Lego 92409
- Diamètre extérieur : 17.5 [mm]
- Diamètre intérieur : ?? [mm]
- Epaisseur : 6 [mm]

Électronique de contrôle
Divers composants électroniques pour le contrôle-commande. A ce jour je n'ai pas décidé comment je fait le contrôleur principal. Je vais sélectionner des périphériques (moteurs, capteurs, actuateurs, etc) et ensuite je vais sélectionner l'électronique de contrôle en fonction du nombre d'entrées sorties dont j'ai besoin.
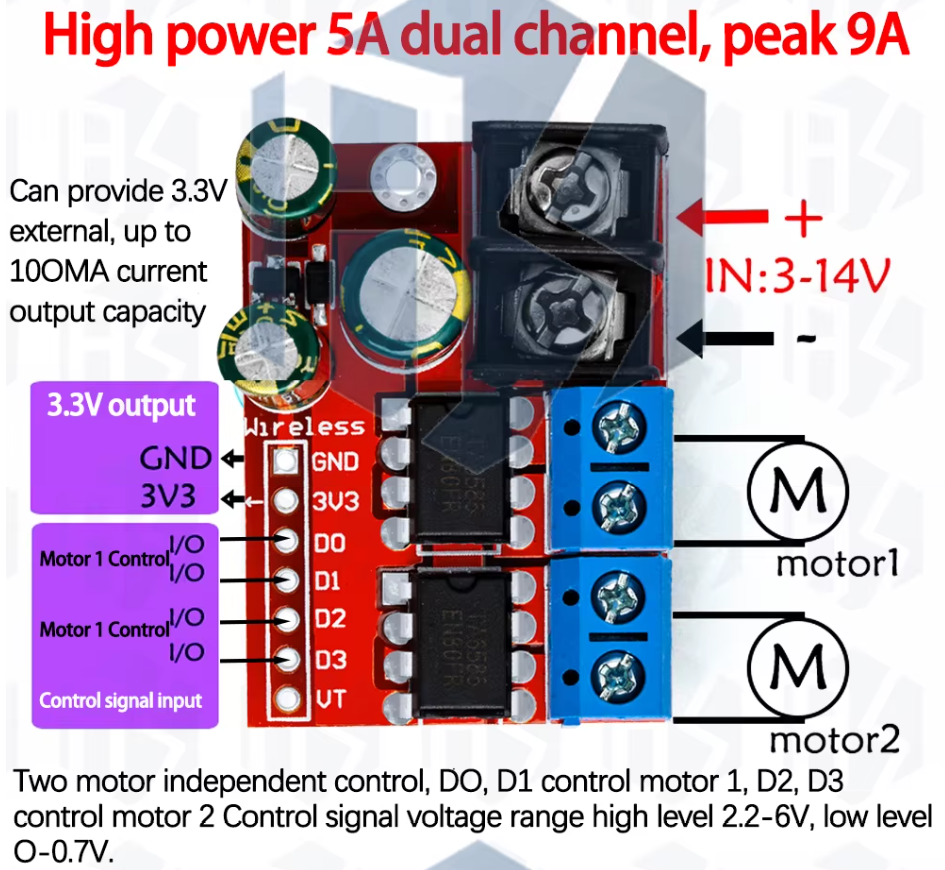
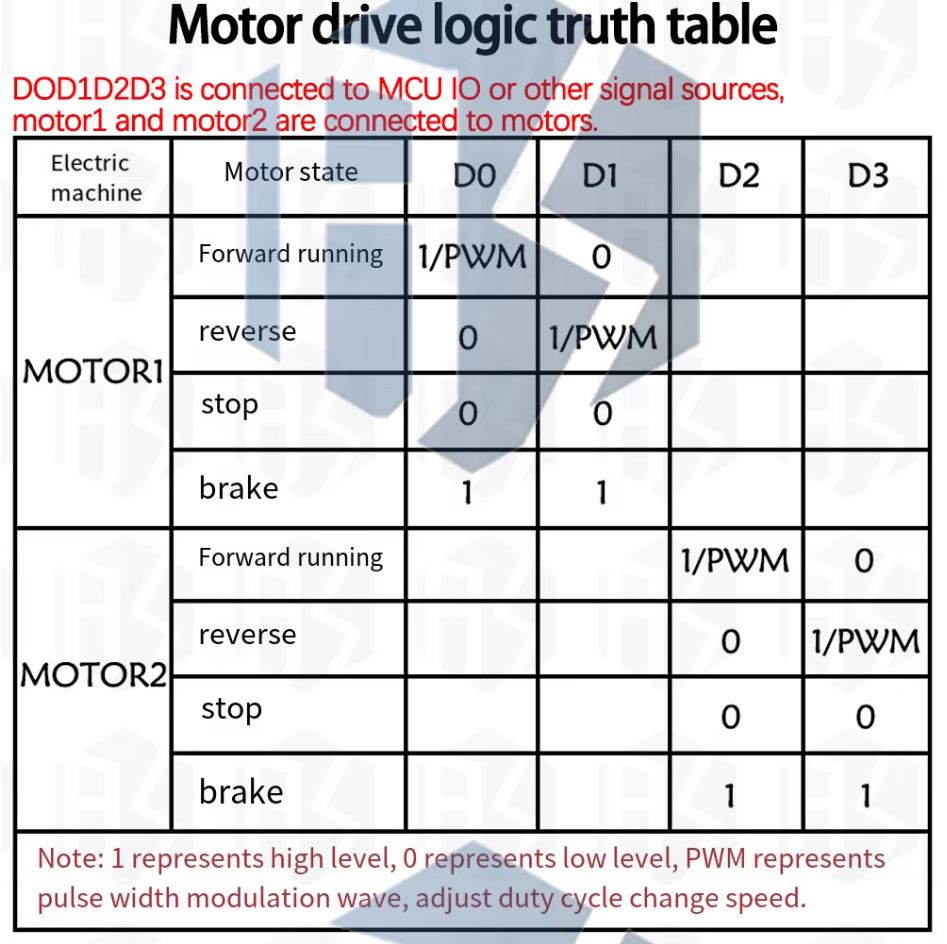
Driver moteur DC lanceurs, contour,...
- Modèle : ZK-5AD
- Courant max : 5 [A]
- Tension max : 14 [V]
- Sorties : 2 sorties
- Entrées : 4 PWM
Convertisseur RS485
Pour la commande des drivers moteurs brushless, il me faut un convertisseurs TTL<->RS485, il y en a à foison avec le chip MAX485.
Câbles et mécanique
Câbles, roulements, axes et autres pièces mécaniques standards.
À compléter